


煤矿水仓清理机器人全新一代煤矿井下水仓清理设备
全新一代煤矿井下水仓清理设备
暂无定价
简介
Introduction
在医疗行业,高精度的定位与高稳定性的拖拽与支撑操作是治疗成功与否的关键。目前,在大多数医疗手术的这一环节中,操作的人为环节过多,在稳定性与位置控制精度方面远远无法与医疗辅助机器人可以提供的操作品质相提并论,这种现象也造成了手术中由医疗辅助人员的精神状态问题所带来失败风险占了相当大的比重。2016年,新松公司着眼于医疗机器人市场,与国内知名医院合作,共同研发出国内首台应用于肿瘤治疗的医疗辅助机器人。
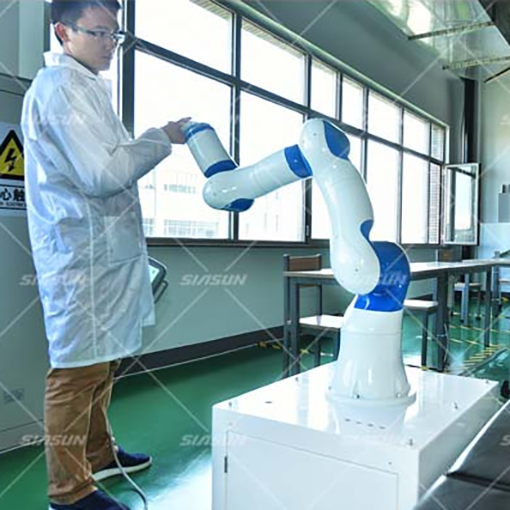
新松公司最新研制的松康医疗辅助机器人,是在磁导航的引导下,结合了影响技术,完成了机器人末端对患者病灶肿瘤位置进行精准定位,并辅助医生进行相应的手术操作的机器人。
新松公司最新研制的松康医疗辅助机器人,基于柔性多关节机器人平台进行研发,采用多层次安全控制技术,实现对于关键信息的冗余控制,内部通过软件实现机器人安全保护逻辑功能。机器人采用了全新的多层次安全控制技术不但确保了机器人在手术过程中安全稳定,也确保手术过程中患者及医护人员的安全。同时,为确保手术精准,机器人可以实现人体上身多位置多角度的定位功能,并在磁定位传感器的导引下避让人体骨骼对进针的影响。在工艺设计上,医疗辅助机器人将机械人本体、热消融设备、导航系统、诊疗床集成一体,实现了占地空间小,功能多样化的医疗辅助治疗设备。
多重安全保护机制,术中为医生及患者提供全方位安全保护;
多自由度设计,可以实现大范围覆盖及高灵活度;
采用直驱控制技术,大幅提高机器人精度和定位准确度;
模块化设计,主要部件便于保养与替换;
精准力控制,实现拖拽示教精准定位功能。




